服裝企業產品設計開發企劃方案 構建以市場為導向的創新設計體系
在競爭日益激烈的服裝市場中,一套系統化、前瞻性的產品設計開發企劃方案是企業構建核心競爭力、實現可持續發展的關鍵。本方案旨在構建一個以市場為導向、以創意為驅動、以供應鏈為支撐的整合性產品設計開發體系,確保產品從概念到成衣的每一步都精準、高效且富有商業價值。
一、 市場調研與趨勢分析:設計開發的基石
設計并非空中樓閣,其起點必須是深刻的市場洞察。企劃初期,需組建專項小組,開展以下工作:
- 宏觀趨勢研究:分析社會文化、經濟、科技(如可持續材料、智能制造)及消費者生活方式變遷對服裝需求的影響。
- 目標客群深度畫像:通過數據分析、社群觀察、訪談等方式,明確核心消費群體的年齡、職業、收入、價值觀、著裝場合、購物偏好及未被滿足的痛點。
- 競爭品牌對標分析:深入研究直接競爭對手及行業標桿品牌的產品結構、設計風格、價格帶、營銷策略及市場反饋,尋找差異化機會點。
- 流行趨勢整合預測:結合國際權威時裝周、流行趨勢機構報告、社交媒體熱點、街頭文化等,提煉出適用于本品牌的下季色彩、面料、廓形、圖案及關鍵細節趨勢。
二、 品牌定位與季度主題設定:賦予設計靈魂
基于市場調研,明確本季產品設計的戰略方向:
- 強化/微調品牌DNA:確保新產品系列與品牌核心價值、風格定位(如極簡、復古、潮酷、奢華)一脈相承,同時注入新鮮元素以保持活力。
- 確立季度主題與故事線:提煉一個富有感染力的核心概念(如“都市漫游者”、“數字生態”),并延展出色系、關鍵面料、核心廓形和標志性設計元素,形成完整的設計敘事。
- 制定商品企劃概要:初步規劃產品系列結構(如主打系列、膠囊系列、配飾系列)、各品類占比、價格梯隊以及上市波段計劃。
三、 創意設計與產品實現:從概念到實物
此階段是將企劃轉化為具體產品的核心環節:
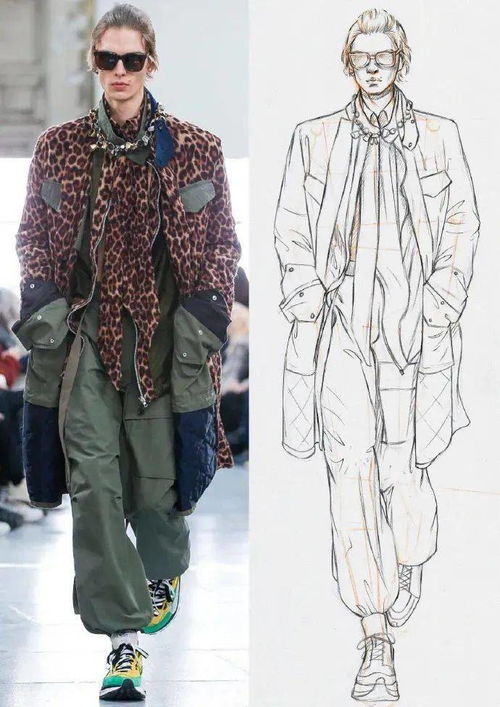
- 設計拓展與草圖繪制:設計團隊根據主題、色卡、面料冊進行大量草圖創作,涵蓋外套、上衣、裙裝、褲裝、連衣裙等全品類,并初步考慮搭配性。
- 面料與輔料開發/采購:與供應鏈密切合作,開發專屬面料或篩選現有面料庫,確保其質感、花色、功能性(如防水、透氣、彈性)符合設計需求與成本控制。同步選定紐扣、拉鏈、標牌等輔料。
- 版型設計與樣衣制作:資深版師與設計師緊密溝通,通過立體裁剪或平面制版,將設計圖轉化為精準的紙樣。制作首輪樣衣(原型樣),在標準人臺上審視初步效果。
- 審樣與修改優化:組織內部評審會,從設計美感、版型合體度、工藝可行性、成本控制等多維度評估樣衣。經過多輪試穿、修改和調整,直至達到最佳效果,確定最終生產版型與工藝單。
四、 成本核算與生產準備:確保商業可行性
設計定案后,需進行嚴格的商業化落地評估:
- 詳細成本核算:根據最終確認的面輔料、工藝復雜度、工時等,精確計算單件產品成本,確保符合既定商品企劃中的定價與利潤率目標。
- 技術文件包制作:編制完整的技術包,包括最終樣衣、修正后的紙樣、面輔料規格及用量說明、詳細的工藝流程圖和質量標準(AQL)。
- 供應商確認與生產計劃:與合格供應商確認大貨生產安排,制定嚴格的生產時間表與質檢計劃,確保按時按質交付。
五、 營銷預熱與上市反饋:完成設計閉環
產品開發企劃需與市場營銷提前銜接:
- 視覺形象與內容創作:基于季度主題,策劃拍攝型錄、廣告大片及短視頻內容,為新品上市營造氛圍。
- 銷售工具準備:制作產品知識手冊、搭配建議、賣點話術,培訓銷售團隊。
- 上市后數據監控與反饋收集:追蹤首批產品的銷售數據(售罄率、SKU貢獻度)、客戶評價及市場口碑,這些寶貴信息將成為下一季產品設計開發企劃的重要輸入,形成持續優化的閉環。
成功的服裝產品設計開發企劃是一個融合了藝術創意、商業邏輯與精密執行的系統工程。它要求設計、商品、營銷、供應鏈等部門打破壁壘,協同作戰,最終將消費者洞察與品牌愿景,轉化為貨架上既叫好又叫座的商品,從而在市場中贏得持續的成功。
如若轉載,請注明出處:http://www.deltaonline.cn/product/77.html
更新時間:2026-04-12 19:09:33